Universal motor

The universal motor is a machine for converting electrical energy into mechanical energy (rotary motion). Its layout corresponds to that of a DC series motor (stator and rotor windings are connected in series). It can be operated with either direct current or alternating current. As opposed to DC motors, stator and rotor cores are made of laminated sheet in order to keep eddy-current losses to a minimum in the case of alternating voltage.
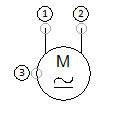
Terminals 1 and 2 are used to connect operating voltage (AC/DC) to the motor. Terminal 3 is a rotary terminal mechanism. A motor test bench or a further motor can be connected here, for example. (The direction of rotation is usually reversed via the connection. This can be selected with the connecting cable.)
The Current (RMS) parameter is used to specify nominal current for operation with direct voltage as well as alternating voltage. Idling speed of the motor during operation with direct current can be indicated as a ratio to nominal rotary speed with the parameter Idle revolution : Rated speed. The absolute value of idling speed is determined by multiplying nominal speed by the specified ratio (e.g. nominal rotary speed 2000 rpm * 1.1 = idling speed 2200 rpm).
The additional simulation value, Revolution (ø), is used to read out average motor speed, so that design-related vibration due to rotational speed is compensated for in the display in the case of operation with alternating current.
Adjustable parameters
| Designation | Range | Default value |
|---|---|---|
| Characteristic data | Alternating current, Direct current | Alternating current |
| Power | 0.001 ... 1000 kW | 0.2 |
| Revolution | 1 ... 30000 1/min | 3000 |
| Voltage | 1 ... 10000 V | 230 |
| Current (RMS) | 0.01 ... 100 A | 3 |
| Frequency | 30 ... 100 Hz | 50 |
| Designation | Range | Default value |
|---|---|---|
| U_N_AC : U_N_DC | 1 ... 10 | 1.643 |
| Designation | Range | Default value |
|---|---|---|
| n_0 : n_N | 1.001 ... 100 | 1.5 |
| Designation | Range | Default value |
|---|---|---|
| Direction of rotation | Right, Left | Right |
| External torque | 0 ... 100 N.m | 0 |