Synchronous motor

The synchronous motor is a machine for converting electrical energy into mechanical energy (rotary motion). It’s a 3-phase motor in which the rotor always runs synchronous to the stator’s rotary field. This version of the synchronous motor is equipped with an additional squirrel cage, so that it can be started up in accordance with the asynchronous motor principle.
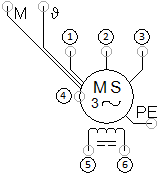
Terminals 1 through 3 are used to connect 3-phase current for the generation of a rotary field in the motor’s stator. Terminals 5 and 6 are used to connect direct current to the excitation windings. Terminal 4 is a rotary terminal mechanism. A motor test bench or a further motor can be connected here, for example. (The direction of rotation is usually reversed via the connection. This can be selected with the connecting cable.) The other electrical terminals are used for connection to the electrical section of the motor test bench.
If the synchronous motor is idled without a load, a so-called V curve can be recorded which reflects the relationship between excitation current and effective stator current. Nominal excitation current indicates the point of minimum stator current, at which power factor is also equal to 1.
Nominal excitation current can be specified as a ratio to maximum excitation current with the parameter Ratio Current : Max. Current. The absolute value of nominal excitation current is determined by multiplying maximum excitation current by the specified ratio (e.g. maximum excitation current 0.95 A * 0.5 = nominal excitation current 0.475 A).
The synchronous motor’s characteristic data (for example winding resistances, inductances, number of pole pairs etc.) are automatically ascertained in the background after entering the performance data. Details can be found in the following separate section: Simulation of rotating machines.
Adjustable parameters
| Designation | Range | Default value |
|---|---|---|
| Internal wiring | Star connection, Delta connection | Star connection |
| Designation | Range | Default value |
|---|---|---|
| Power | 0.001 ... 1000 kW | 0.3 |
| Revolution | 1 ... 10000 1/min | 1500 |
| Power factor cos φ | 0.1 ... 1 | 0.97 |
| Line-to-line voltage | 1 ... 10000 V | 400 |
| Phase current | 0.1 ... 100 A | 0.66 |
| Frequency | 30 ... 100 Hz | 50 |
| Designation | Range | Default value |
|---|---|---|
| Voltage (Max.) | 1 ... 10000 V | 150 |
| Current (Max.) | 0.1 ... 100 A | 0.95 |
| Designation | Range | Default value |
|---|---|---|
| I_f : I_f_max | 0.01 ... 1 | 0.5 |
| Designation | Range | Default value |
|---|---|---|
| External torque | 0 ... 100 N.m | 0 |