Three-phase current squirrel-cage asynchronous motor

The 3-phase asynchronous motor is a machine for converting electrical energy into mechanical energy (rotary motion). It’s a widely used type of induction motor which is simple, rugged and maintenance-free. It uses a short-circuited rotor and rotor current is generated by means of induction. Asynchronous motors are used in particular as high-performance servo-drives. The stator includes three windings, each of which is arranged at an angle 120° to the next. A slotted, laminated rotor core is used. A cage made of die-cast aluminum is inserted into the slots. The cage thus comprises a system of short-circuited electrical conductors.
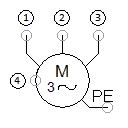
The three phases of the 3-phase current are connected to terminal 1 through 3. Terminal 4 is a rotary terminal mechanism. A motor test bench or a further motor can be connected here, for example. (The direction of rotation is usually reversed via the connection. This can be selected with the connecting cable.)
The other electrical connections serve to connect to the electrical part of the engine test bench.
The inner wiring selected in the parameters determines how entered machine performance data is interpreted in order to ascertain the machine’s characteristics data such as winding resistances, inductances, number of pole pairs etc. These characteristic machine data are ascertained automatically in the background after the performance data have been entered. Details can be found in the following separate section: Simulation of rotating machines. In addition to the performance data, tightening torque and pull-out torque can also be entered to the parameters as a ratio to nominal torque. This makes it possible to specify the characteristic load curve of an actual machine somewhat more accurately.
Adjustable parameters
| Designation | Range | Default value |
|---|---|---|
| Internal wiring | Star connection, Delta connection | Delta connection |
| Designation | Range | Default value |
|---|---|---|
| Power | 0.001 ... 1000 kW | 0.25 |
| Revolution | 1 ... 10000 1/min | 1350 |
| Power factor cos φ | 0.1 ... 0.99 | 0.78 |
| Line-to-line voltage | 1 ... 10000 V | 400 |
| Phase current | 0.1 ... 100 A | 0.77 |
| Frequency | 30 ... 100 Hz | 50 |
| Designation | Range | Default value |
|---|---|---|
| T_0 : T_N | 0.1 ... 10 | 1.35 |
| Designation | Range | Default value |
|---|---|---|
| T_B : T_N | 0.1 ... 10 | 1.58 |
| Designation | Range | Default value |
|---|---|---|
| External torque | 0 ... 100 N.m | 0 |