Drehstrom-Asynchronmotor mit Käfigläufer

Der Drehstrom-Asynchronmotor ist eine Maschine zur Umwandlung elektrischer Energie in mechanische Energie (Drehbewegung). Es handelt sich um einen verbreiteten Induktionsmotortyp, der einfach, robust und praktisch wartungsfrei ist. Der Läufer ist ein Kurzschlussläufer und der Läuferstrom kommt durch Induktion zustande. Als Servoantrieb werden Asynchronmotoren besonders im oberen Leistungsbereich eingesetzt. Im Ständer sind drei um 120° gegeneinander versetzte Wicklungen angeordnet. Der Läufer besteht aus einem genuteten Blechpaket. In die Nuten wird ein Käfig aus Aluminium im Druckgussverfahren eingebracht. Der Käfig ist somit ein System kurzgeschlossener elektrischer Leiter.
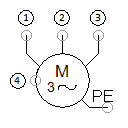
An den Anschlüssen 1-3 werden die drei Phasen des Drehstroms angeschlossen. Der Anschluss 4 ist ein mechanischer Rotationsanschluss. Hier kann beispielsweise ein Motorenprüfstand oder ein weiterer Motor angeschlossen werden. (In der Verbindung wird die Drehrichtung normalerweise umgekehrt. Dies lässt sich in der Verbindungsleitung einstellen.)
Die weiteren elektrischen Anschlüsse dienen zur Verbindung mit dem elektrischen Teil des Motorenprüfstandes.
Die in den Parametern gewählte innere Verdrahtung bestimmt, wie die eingegebenen Leistungsdaten der Maschine zur Ermittlung der charakteristischen Daten der Maschine wie z.B. Wicklungswiderstände, Induktivitäten, Polpaarzahl etc. interpretiert werden. Diese charakteristischen Daten der Maschine werden nach der Eingabe der Leistungsdaten im Hintergrund automatisch ermittelt. Details dazu finden Sie im separaten Abschnitt Simulation von rotierenden Maschinen. Zusätzlich zu den Leistungsdaten kann in den Parametern das Anzugsmoment und das Kippmoment als Verhältnis zum Nenndrehmoment angegeben werden. Damit ist es möglich, die Belastungskennlinie einer realen Maschine etwas genauer vorzugeben.
Einstellbare Parameter
| Bezeichnung | Bereich | Standardwert |
|---|---|---|
| Interne Verdrahtung | Sternschaltung, Dreieckschaltung | Dreieckschaltung |
| Bezeichnung | Bereich | Standardwert |
|---|---|---|
| Leistung | 0.001 ... 1000 kW | 0.25 |
| Drehzahl | 1 ... 10000 1/min | 1350 |
| Leistungsfaktor cos φ | 0.1 ... 0.99 | 0.78 |
| Außenleiterspannung | 1 ... 10000 V | 400 |
| Leiterstrom | 0.1 ... 100 A | 0.77 |
| Frequenz | 30 ... 100 Hz | 50 |
| Bezeichnung | Bereich | Standardwert |
|---|---|---|
| T_0 : T_N | 0.1 ... 10 | 1.35 |
| Bezeichnung | Bereich | Standardwert |
|---|---|---|
| T_B : T_N | 0.1 ... 10 | 1.58 |
| Bezeichnung | Bereich | Standardwert |
|---|---|---|
| Externes Drehmoment | 0 ... 100 N.m | 0 |